
Interested in learning more about my Chinese name? Click 赵家樑.
Hi there!
I'm currently working on building general physically grounded AI at 1X Technologies. Before that, I obtained my PhD from MIT CSAIL. I was advised by Prof. Edward H. Adelson, and I had the opportunity to collaborate with Prof. Russ Tedrake and Prof. Kaiming He. Below is a short summay of what I've been up to in recent years:
2025 - Present:
Palo Alto, CA
Working towards general purpose physically grounded AI for humanoid robots. In general I focus on making AI agents smarter, more human-like, and more physically grounded.
2022 - 2025:
Cambridge, MA
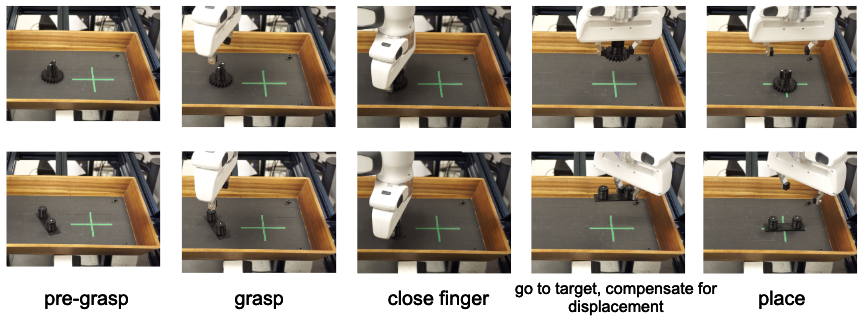
Working towards my PhD at MIT CSAIL and MechE. I research contact-aware robotic manipulation and robot learning, with a focus on large behavior models and multi-modal sensing, especially tactile sensing.
2024 Summer⛱️:
Cambridge, MA
Worked as a research intern with the Large Behavior Models team at Toyota Research Institute. Had a great deal of satisfaction working with top researchers in the field on multi-modal sensing and cutting edge foundational models to scale robotics up.
2021 - 2022🚕:
Mountain View, CA
Worked on planning & prediction for self-driving cars at Nuro Inc. Very much enjoyed having real cars running on real streets in the city of Mountain View with my own algorithms. It felt crazy (and maybe a bit uneasy:) when I also sat in that car. Also enjoyed the California sunshine.
2018 - 2020🦿:
Pittsburgh, PA
Worked towards my Master in Robotics degree at The Robotics Institute of Carnegie Mellon University. Had the great pleasure to work with Prof. Oliver Kroemer at the IAM lab. Focused mostly on robot learning for robot manipulation.
2017 - 2018🤖:
Berkeley, CA
Worked on building & optimizing exoskeletons with Prof. Ruzena Bajcsy at UC Berkeley HART Lab as an undergrad researcher.
Out of work & school, I enjoy software and hardware robotics DIY. I recently started filming some of my hardware DIYs. Check out my YouTube channel Crafted by JZ or my BiliBili channel 试作间 if interested. Check out the #hobby section for released projects. Recently I'm working on an ambitious software project called tpvortex.org. Stay tuned.
News
- 2025 May: PolyTouch won the Best Paper Award in Field and Service Robotics at ICRA 2025!
- 2025 Feb: I defended my PhD thesis and graduated from MIT! I'm now working on building general purpose physically grounded AI for humanoid robots at 1X Technologies.
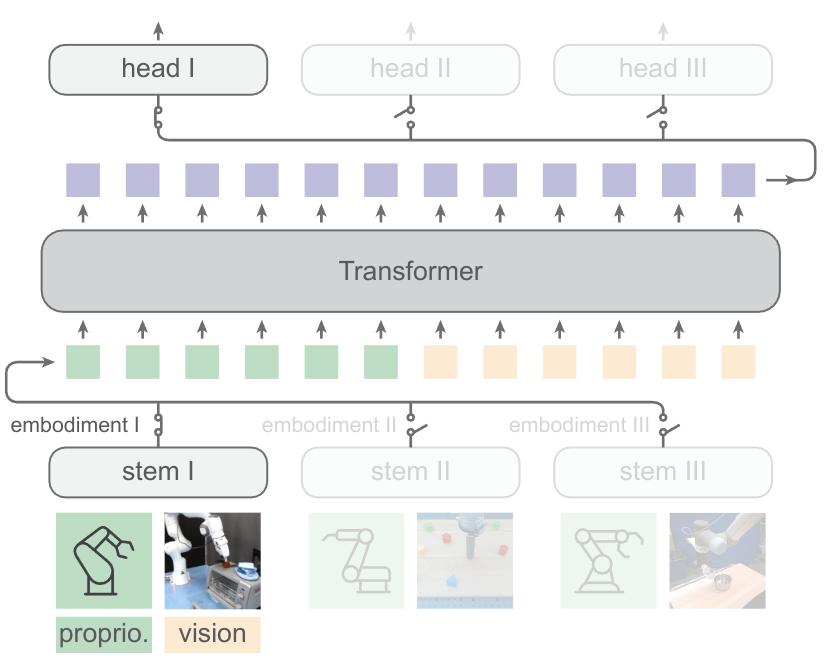
- 2024 Sept: Heterogeneous Pre-trained Transformers (HPT) has been accepted to NeurIPS 24 as a spotlight paper!
- 2024 Sept: Our paper Transferable Tactile Transformers (T3) has been accepted to CoRL 24!
- 2024 Aug: Wrapped up my internship with the Large Behavior Models team at Toyota Research Institute! More details on my projects at TRI coming soon.
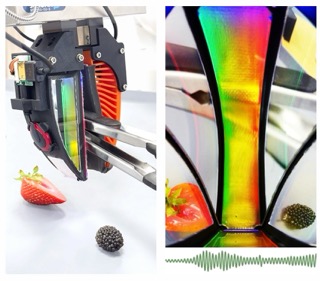
- 2024 May: We published a new paper on a foundational framework for camera-based tactile sensing and contact-aware manipulation T3!
- 2024 Jan: PoCo was accepted to RSS 2024! See it on MIT News.
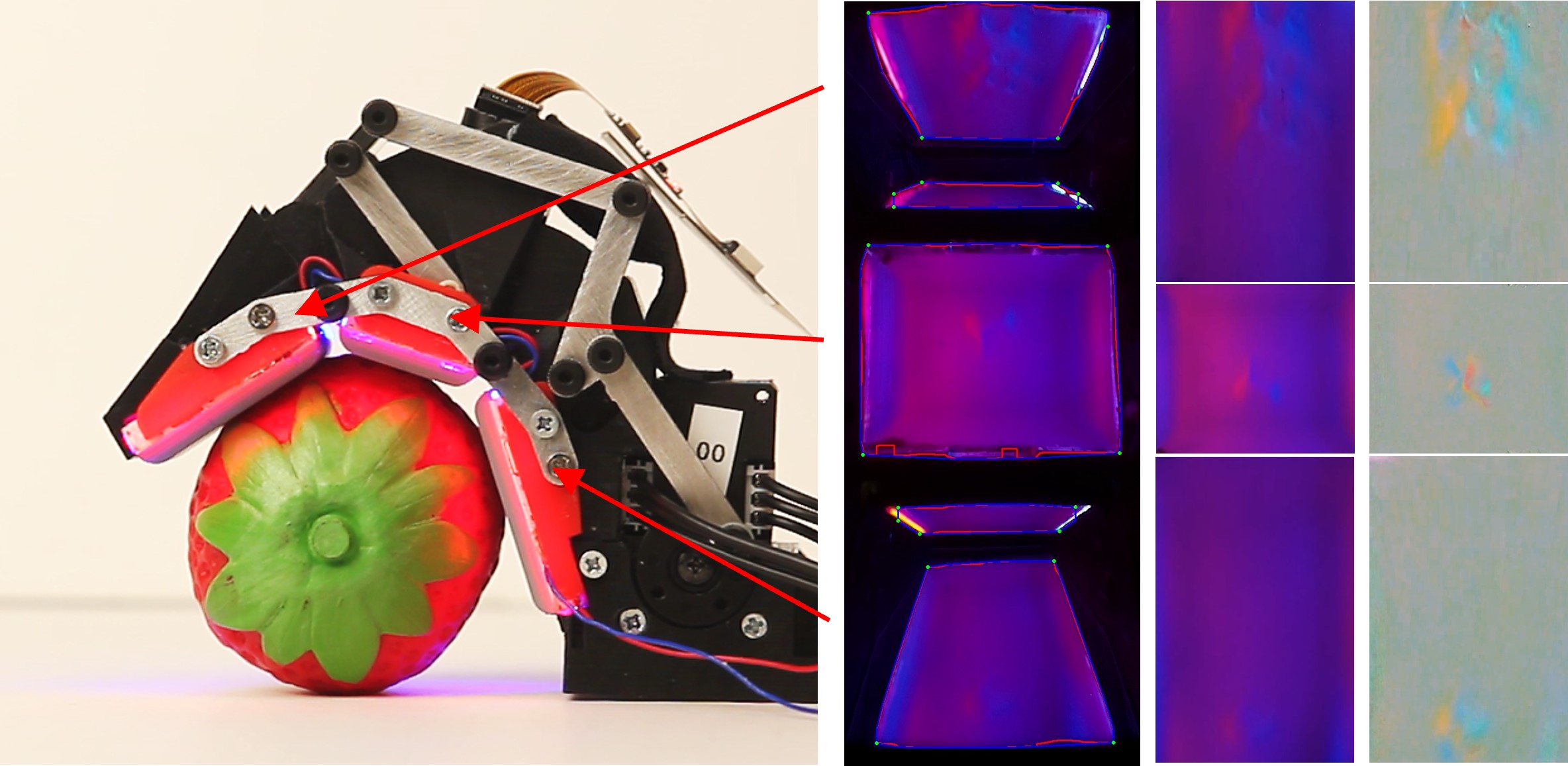
- 2023 Oct: My paper on GelSight Svelte was nominated for the best paper award at IROS 2023! Also see it on MIT News.
- 2023 May: My paper FingerSLAM was presented at ICRA in London.
- 2023 May: I passed my qualification exam, so I'm officially a PhD candidate now:)
Research




...more on my Google Scholar page.
Hobby Corner

Neptune MIDI
A 3d printed MIDI controller that can be used for video and photo editing (Lightroom, Photoshop, Premiere, DaVinci Resolve, etc.) It contains mechanical switches, rotary encoders, sliders, a joystick, and a small oled screen. Solidworks source files, STL files, BOM are fully open source.

RS-Slider
A mostly 3d printed, motorized, 2-axis camera slider that is Really Solid (R.S.). Tested with a 15lbs cinema camera setup. Software and hardware W.I.P. Details to be added.
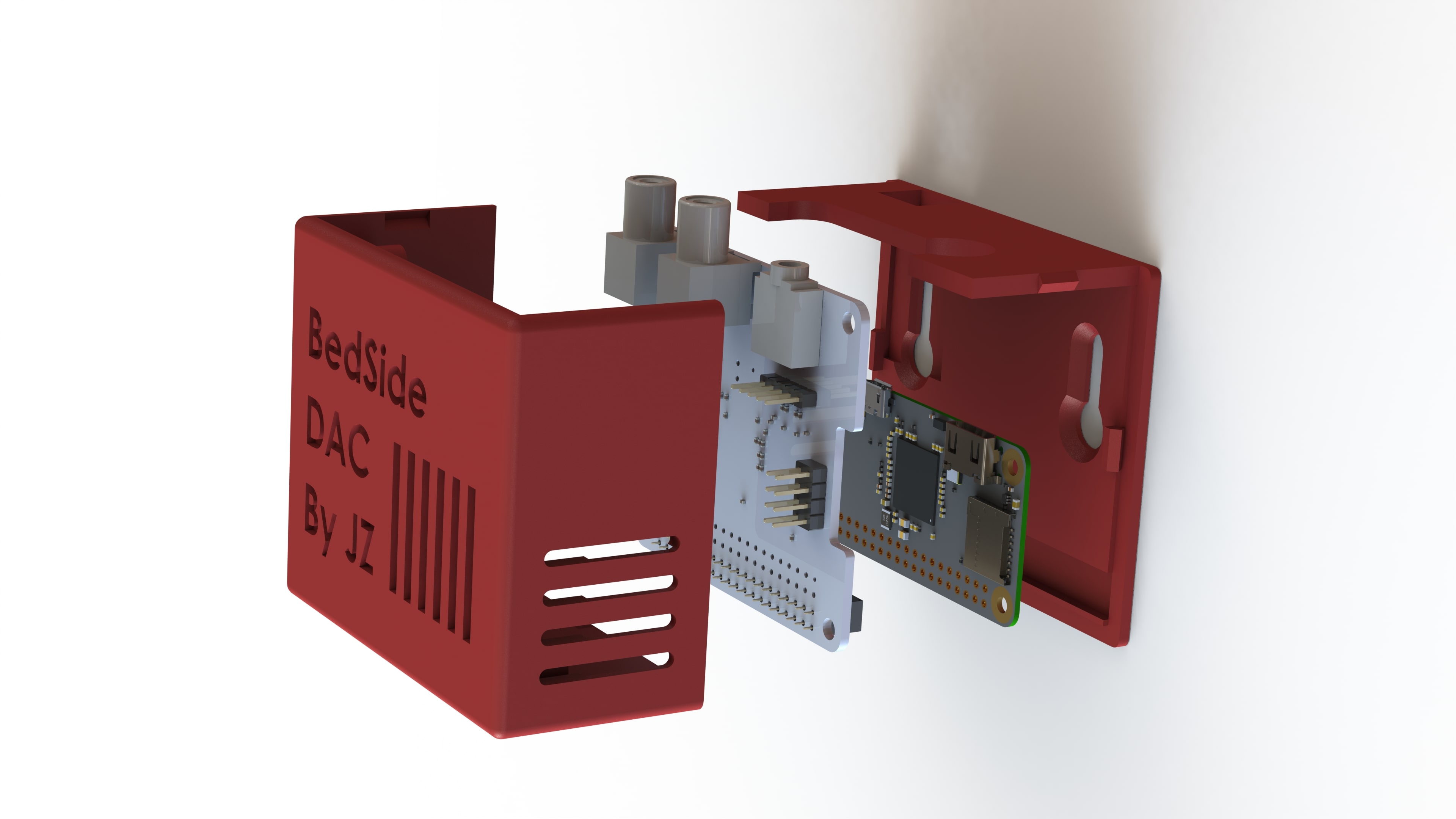
RPI AirPlay HiFi
AirPlay + DAC + AMP, using a Raspberry Pi Zero W and HiFiBerry. Source files & instructins can be found in
2" Filter drawer for astrophotography
A filter drawer that houses a single 2" filter which be used between a telescope and a Nikon or Canon camera